

The adaptive control models, referred to by Michon (1985), deal primarily with the operational level of car driving behaviour. These models have been inspired by the principle of adaptive control in which the human operator adapts his control behaviour to the characteristics of the system to be controlled. Michon (1985) distinguished between two different classes of adaptive control models; the servo-control models and the information flow control models. The first class is primarily concerned with manual control in the context of signals that are continuous in time, while the second involves discrete decisions. In practice, the distinction has somewhat vanished, resulting in hybrid models. Servo-control models consider driving as a continuous tracking task. These models have been applied to operational performance of steering on straight roads and curves and to obstacle avoidance maneuvers. Input signals are transformed by transfer functions into a vehicle output. Transfer functions represent both driver and vehicle dynamics and contain lead components to account for preview or anticipation of the driver and lag components representing driver and vehicle inertia.
Young (1969) discussed a number of different types of adaptation to the system to be controlled. Input adaptation refers to the ability of the operator to detect familiar or repeated patterns in the input and track these in a predictive or open loop fashion. The adaptive control models applied to the driver task mainly refer to input adaptation. The best known is the STI model described by McRuer et al. (1977). One variant of this model, see figure below, refers to compensatory steering control on straight roads. In this model the driver is assumed to act as a regulator against external disturbances that arise from wind and road surface effects. Thus, operational performance is continuously adapted to system disturbances and vehicle characteristics. The steering wheel output is determined by transfer functions while the visual inputs to the model are lateral position and vehicle heading errors. In the ‘input adaptation’ models the predictable aspects of the steering task, such as the required steering angle as determined by the road curvature, are described as precognitive tracking while the random components in the input signal are handled by compensatory tracking. Another important type of adaptation is referred to as controlled element adaptation. This occurs when the operator changes his control strategy as an adaptation to changes in the dynamics of the system. If a driver normally drives a sedan but changes to a sports car he has to adapt his steering behaviour to the different steering ratio. In general, any change in vehicle characteristics or vehicle dynamics requires some form of controlled element adaptation. In the adaptive control models, the operator is described as someone who responds to the task-characteristics instead of someone who actively creates the task. However, because the driving task is self-paced most of the time, the behaviour of the driver affects the dynamics of the task.
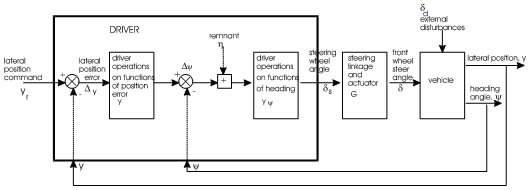
STI compensatory steering model (from Reid, 1983).
Some properties of the adaptive control models
A consistent feature in attempts to validate these models with human drivers is that subjects are instructed to drive with a fixed speed, thereby excluding possible effects of tactical behaviour on operational performance. Also, the parameters that are found using human drivers often apply to only one situation. Variation in speeds and curve radii will affect the parameters of the models (see for exampleDonges, 1978). It is argued here that operational performance and behaviour on the tactical level are interdependent and should both be incorporated into a single model.
There are a large number of examples that suggest that speed is used to compensate for detrimental effects of various task-related and situational factors on operational steering performance. For example,Good and Baxter (1986) used the STI model to study steering performance as a function of roadway delineation. The quality of steering was expressed, among other things, by the remnant that accounts for that part of the manual control output that is uncorrelated with the input. A smaller remnant then indicates better steering performance. Wider edge lines resulted in a smaller remnant because of improved vehicle guidance. However, wider edge lines also resulted in higher speed. Also, day time driving resulted in better steering performance and higher speed compared to night time driving. Thus, it appears that factors that improve steering performance result in higher speeds. However, the effects on speed are not accounted for by the model and are considered undesirable artifacts.
Tenkink (1988) studied the effects of sight distances of 27, 37 and 183 meters with fixed speeds. Standard deviation of lateral position (SDLP) increased with higher fixed speeds over all sight distances with steeper increases for smaller sight distances. A smaller sight distance resulted in a larger SDLP at a given speed. Lowering sight distance thus deteriorated steering performance and this was aggravated with higher speeds. However, if drivers were allowed to choose their own speed, reductions in sight distance resulted in the choice of lower speeds while SDLP was maintained on a relatively constant level, except for very short sight distances of 27 meters where speed was not reduced enough to prevent an increase in SDLP. According to Tenkink, a safety margin based on time may have caused the speed reduction under reduced sight distance, because the speed-distance curve appeared to approach a line through the origin, with a slope corresponding to a minimum time of 1.2 seconds for driving on straight roads. Harms (1993) also studied the effect of reduced sight distance on speed choice and lane keeping. She found that reduced sight distance resulted in the choice of a lower speed, while SDLP was unaffected, even with the shortest sight distance of 30 meters. She suggested that the speed reduction had prevented a deterioration of lateral control performance as a function of sight distance.
These studies suggest that situational factors that affect operational steering performance are compensated for by speed choice if task conditions are self-paced. If drivers are not given the opportunity to adapt behaviour on the tactical level they are forced to improve behaviour on the operational level, and it is under these conditions that the adaptive control models are normally tested.
In most adaptive control models lateral position deviations, heading angle and anticipated curvature are treated as the input variables that are continuously transformed into a steering wheel angle. The validity of the input variables and the assumption of continuous minimization of errors has been challenged by a number of authors. Riemersma (1987) performed a number of experiments to find the visual cues that are used by the driver in steering control. He found that control of lateral position alone is not sufficient for lane keeping in straight road driving and that heading angle is not directly used as an input variable in steering control, in contrast to the assumption of adaptive control models.
Blaauw (1984) studied the multitasking aspects of car driving. A monitoring function was assumed to supervise manual control associated with steering and speed control on the operational level. Because of a supervisory function, perceptual and control actions are not executed continuously, in contrast to the assumption of the adaptive control models, thus allowing free time in-between control actions. Experienced drivers adjusted their steering control better to increased task demands invoked by driving with a constant speed or night time driving compared to inexperienced drivers. Also, in self-paced conditions where drivers were free to choose their own speed, increasing task demands by occlusion or night time driving resulted in the choice of lower speeds.
Godthelp (1984) questioned the assumption of the adaptive control models that the driver behaves in a closed-loop error-correction mode in which continuous attention is allocated to the steering task. He applied the Time-to-Line-Crossing (TLC) as a measure that reflects the time available for the driver before a correcting steering action is needed to prevent a lane boundary exceedence. The amount of time the driver voluntarily refrains from using visual feedback (occlusion time) corresponded closely with TLC values. This means that when the driver has less time available to postpone correcting steering actions, a request for visual feedback is made sooner. This implies that the driver is aware of the time available and that correcting steering actions are generated when some TLC criterion has been reached. Drivers chose occlusion times of about 40% of the available time, irrespective of speed. Also, if steering corrections during the occlusion interval were larger, the driver requested visual feedback sooner, suggesting awareness of the driver’s own steering behaviour and a compensatory effect on visual sampling. When, in Godthelp (1984), drivers were asked to switch to error-correction when vehicle motion could still comfortably be corrected to prevent a crossing of the lane boundary, it appeared that drivers chose a strategy where TLC on the moment of steering correction was about constant over different (fixed) speeds. This constancy of TLC over speed was obtained without occlusion, while the strategy of requesting visual feedback when 40% of available time was reached occurred under occlusion. This difference was explained as a result of the degree of uncertainty regarding the vehicle trajectory. Thus, Godthelp found strong evidence that steering control is not continuous, that drivers are sensitive to TLC and that TLC information is used in steering control.
The relation between vehicle dynamics and operational behaviour constitutes an important aspect of adaptive control models. Godthelp and Käppler (1988) found that changing the vehicle characteristics to heavy understeering resulted in increased steering control effort but similar lateral control performance, as evidenced from TLC control performance, compared to a normally understeered car, because drivers were able to develop an accurate internal representation of the vehicle dynamics. In both normal and heavy understeered cars the accepted occlusion times were about 40% of available time, independent of (fixed) speed. This suggests that drivers adapt their visual information intake and steering behaviour to the dynamic characteristics of the vehicle such that the same strategy is maintained. From the results of Godthelp and Käppler it may be inferred that drivers are sensitive to vehicle handling properties and change their operational behaviour as a function of this if the driver is required to drive with a fixed speed. This may be considered as an example of controlled element adaptation and thus as an example of adaptation of operational behaviour.
A number of other studies have revealed effects of vehicle characteristics on tactical driver behaviour.Rumar et al. (1976) studied the effects of studded tires on speed choice in curves. Drivers with studded tires drove faster compared to drivers with unstudded tires in icy road conditions. This did not result in lower safety, since the ‘safety margin’, defined as the difference between real and critical lateral acceleration, was larger with studded tires. Summala and Merisalo (1980) also found that drivers with studded tires chose higher speeds in curves in low-friction conditions and that the safety margin was greater for drivers with studded tires in slippery conditions. The higher speeds with studded tires in low friction conditions may be regarded as an adaptation of tactical behaviour to the increased friction coefficient induced by studded tires. Also, the acceleration capability of cars has been shown to affect behaviour. Evans and Herman (1976) found that drivers accepted smaller gaps with oncoming cars while negotiating intersections if the acceleration capability of the car was higher. However, the physical safety margin was not negatively affected by acceleration capability. Also, newer cars used higher levels of deceleration compared to older cars when they stopped at signalized intersections (Evans and Rothery, 1976). This was explained as a possible adaptation of behaviour (on the tactical level) to compensate for reduced mechanical conditions in older vehicles. Evans and Wasielewski (1983) found that drivers of newer cars and cars with intermediate mass followed with a smaller time-headway. This may also be the result of better deceleration capabilities of newer cars. Evans (1991) postulated that improved braking and vehicle handling characteristics result in increased speeds, closer following and higher speeds in curves. When safety changes are invisible to the user as may be the case with seat belts and increased crashworthiness, there is no evidence of any measurable human behaviour feedback. A similar point was made by Lund and O’Neill (1986). Design changes that reduce the likelihood of a crash do have an effect on behaviour. They stated that how a car is driven depends on feedback to the driver about the car’s handling characteristics. Vehicle-related factors may then affect both operational and tactical driver behaviour depending on the visibility of the feedback.
The following literature was referred to:
- Blaauw, G.J. (1984). Car driving as a supervisory control task. Thesis. Institute for Perception TNO, Soesterberg, The Netherlands.
- Donges, E. (1978). A two-level model of driver steering behaviour. Human Factors, 20, 691-707.
- Evans, L.E. (1991). Traffic safety and the driver. Van Nostrand Reinhold, New York.
- Evans, L. and Herman, R. (1976). Note on driver adaptation to modified vehicle starting acceleration.Human Factors, 18, 235-240.
- Evans, L. and Rothery, R. (1976). Comments on effects of vehicle type and age on driver behaviour at signalized intersections. Ergonomics, 19, 559-570.
- Evans, L.E. and Wasielewski, P. (1983). Risky driving related to driver and vehicle characteristics.Accident Analysis & Prevention, 15, 121-136.
- Godthelp, J. (1984). Studies of vehicle control. Thesis. Institute for Perception TNO, Soesterberg, The Netherlands.
- Godthelp, J. and Käppler, W.D. (1988). Effects of vehicle handling characteristics on driver strategy.Human Factors, 30, 219-229.
- Good, M.C. and Baxter, G.L. (1986). Evaluation of short-range roadway delineation. Human Factors, 28, 645-660.
- Harms, L. (1993). The influence of sight distance on subjects’ lateral control: a study of simulated driving in fog. In: Gale et.al. (eds). Vision in Vehicles-IV. Elsevier Science Publishers BV, North-Holland.
- Lund, A.K. and O’Neill, B. (1986). Perceived risks and driving behaviour. Accident Analysis & Prevention, 18, 367-370.
- McRuer, D.T.; Allen, R.W.; Weir, D.H. and Klein, R.H. (1977). New results in driver steering control models. Human Factors, 19, 381-397.
- Michon, J.A. (1985). A critical view of driver behaviour models. What do we know, what should we do? In: Evans, L; Schwing, R. (eds.). Human behaviour and traffic safety. New York: Plenum Press.
- Reid, L.D. (1983). A survey of recent driver stereing behaviour models suited to accident studies.Accident Analysis & Prevention, 15, 23-40.
- Riemersma, J.B.J. (1987). Visual cues in straight road driving. Thesis. University of Groningen.
- Rumar, K.; Berggrund, U.; Jernberg, P. and Ytterbom, U. (1976). Driver reaction to technical safety measure-studded tires. Human Factors, 18, 443-454.
- Summala, H. and Merisalo, A. (1980). A psychophysical method for determining the effect of studded tires on safety. Scandinavian Journal of Psychology, 21, 193-199.
- Tenkink, E. (1988). Lane keeping and speed choice with restricted sight distances. In: Rothengatter, T. and de Bruin, R. (eds). Road user behaviour: theory and research. Van Gorcum, Assen/Maastricht, The Netherlands.
- Young, L.R. (1969). On adaptive manual control. Ergonomics, 12, 635-675.